APRENDIZAJE DENTRO DEL CURSO DE ARQUITECTURA DE COMPUTADORAS
Para comenzar con esta reseña de lo aprendido en el curso, cabe mencionar que la tecnologia avanza a pasos muy agigantados y para poder comprenderla mejor, es un deber del informatico conocer su funcionamiento comenzando desde lo que no se ve, es decir toda la logica que tiene el funcionamiento de los sistemas computacionales. Para ello hay una rama del estudio informatico que nos ayuda con ello y es la arquitectura de computadoras.
La arquitectura de computadoras es el diseño y al construccion de una maquina electronica constituida de dispositivos electronicos, la cual se comunica por medio de programas para realizar tareas que se basan en datos para procesar la informacion.
Es de donde entonces nos comenzamos a adentrar al mundo que esta dentro de cada proceso que hace el sistema computacional. A lo largo del curso para poder comprender mejor todo ese funcionamiento, fue necesario apoyarnos mucho en un modelo que nos premitio asimilar de mejor manera todos los procesos, ese fue el modelo de Van Newman, el cual representa el diseño estructurado de un proceso el cual se compone de entradas, procesamiento, salida y una retroalimentacion que va a permitir que este ciclo se repita las veces que se requiera. En el caso del sistema computacional el modelo de Van Newman se compone de 5 elementos fundamentales: la alu, la memoria, la unidad de control, los dispositivos de entrada y salida y los buses de datos.
Uno de los elementos mas imporatantes dentro del procesamiento de la informacion es el microprocesador, al cual en terminos muy coloquiales se le conocce como el cerebro de una computadora. Este microprocesador esta compuesto de el encapsulado, la memoria cache y el coprocesador matematico.
En el mundo existen diversos tipos de sistemas numericos, en el caso de una computadora los sistemas que utilizan son: el binario y el hexadecimal, a lo largo del curso trabajamos con el sistema binario, el cual es denominado asi por que la base con la que trabaja es dos, es decir los numeros utilizados por este sistema son el 0 y el 1, que para la computadora significan apagado (0) y encendido (1).
Es impresionante que apartir de el 0 y el 1 puedan surgir una serie de conocimientos amplios ya que del sistema binario se deriva el algebra booleana, del cual a su vez se derivan una serie de procedimientos que nos permiten llegar al armado de un circuito.
Antes de armar un circuito necesitamos saber que existen diversos tipos de codigos, los cuales nos ayudan a resolver problemas para su posteror solucion. Los codigos son: el BCD, el exceso -3, el codigo gray, entre otros. El BCD se refiere a el sistema que su numeracion en binario llega hasta el numero 10 en decimal. El exceso menos tres es aquel en el que la numeracion comienza a partir del numero 3 en decimal y el codigo gray es aquel al que se le denomina el codigo reflejado.
Ya teniendo en cuenta todo esto para poder armar un circuito simple, tenemos que leer el problema y realizar posteriormente una tabla de verdad, la cual podemos desarrollar con algun codigo, dependiendo de la necesidad que se tenga, ya teniendo la tabla de verdad, proseguiremos con el diseño de estos resultados en los Mapas de karnaugh en donde agruparemos todos los digitos 1 o encendido, los cuales nos originaran funciones, estas son las que nos ayudaran al diseño y alambrado de un circuito.
Existen distintos tipos de circuitos, emntre ellos encontramos el decodificador, el multiplexor y el flip flop. Cada uno tiene un funcionamiento muy inetresante.
el decodificador es un dispositivo en el cual el numero de salidas es igual o menor a dos veces la entradas. En este las lineas de salida se activan con las diversas convinaciones de las entradas. un ejemplo muy claro de este dispositivo es el display.
El multiplexor es un circuito en el cual el numero de entradas es mayor que el munero de salidas, la linea de entrada escigida por una señal de control sera la que pasara a la salida. Los multiplexores es utlizado para controlar el flujo de informacion.
El flip plop son circuitos secuénciales constituidos por puertas lógicas capaces de almacenar un bit, que es la información binaria más elemental. Estos sulen ser de cuatro tipos, el SR, el JK, el D y el T.
Para poder diseñpaor los circuitos de los flip flop`s se puede realizar mediante un diagrama de estados, en el cual se indican los posibles caminos que puede tomar la informacion dentro de un sistema. Primero tenemos que ubicar cuales son las esntradas, salidas y deviersos caminos que tma la informacion, ya teniendo esto hacemos una tabla de evrdad en la cual se indiquen los entradas, el estado actual, el estado siguiente , las salidas y los digitos del flip flop utilizado, posteriormenet hacemos los mapas de Karnaugh correspondientes a cada las salidas y los digitos del flip flop, por ultimo se diseña y alambra el circuito.
Un ejemplo claro de esto lo podemos ver en la entrada con nombre "Ejemplo de un diagrama de estados".
Para finalizar cabe mencionar que todo este funcionamiento y procesamiento se aplica ren las memorias de la computadora, ya que el curso estuvo basado primordialmente en concocimientos seriados, es decir que todos los conocimientos desde el principio tenian una fin, y ese era el llegar a conocer el funcionamiento de las memorias.
Creo que este curso fue muy bueno y de mucho conocimiento ya que en lo personal pienso que es increible que todos aquellos principios del algebra booleana nos guien hasta el diseño de un circuito. Ahora ya tengo otra nocion del funcionamiento de una computadora. Fue un buen curso y pues espero seguir aprendiendo mas y seguir aplicando este conocimiento a lo largo de la carrera.




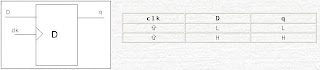 Esta entidad es muy sencilla ya que las entradas y la salida son de un único bit de ancho.
Esta entidad es muy sencilla ya que las entradas y la salida son de un único bit de ancho. El flip flop T basa toda su operatividad en el valor lógico de su única entrada de control. Si en t tenemos el nivel lógico uno, la salida q basculara, cambiando constantemente su valor según le bayan llegando los flancos de subida del reloj. Si la entrada t esta a nivel lógico cero, el flip flop mantiene su valor anterior a modo de una memoria.
El flip flop T basa toda su operatividad en el valor lógico de su única entrada de control. Si en t tenemos el nivel lógico uno, la salida q basculara, cambiando constantemente su valor según le bayan llegando los flancos de subida del reloj. Si la entrada t esta a nivel lógico cero, el flip flop mantiene su valor anterior a modo de una memoria.
 Para lograr este propósito se implementa el siguiente circuito con su tabla de verdad:
Para lograr este propósito se implementa el siguiente circuito con su tabla de verdad:
 Con la anteriormente mencionado se puede implementar un sumador de "n" bits.
Con la anteriormente mencionado se puede implementar un sumador de "n" bits. Una de los cuatro canales de entrada será escogido para pasar a la salida y ésto se logra con ayuda de las señales de control o selección.
Una de los cuatro canales de entrada será escogido para pasar a la salida y ésto se logra con ayuda de las señales de control o selección. Observando con atención el gráfico se puede ver que en la entrada E y en todas las salidas Q, hay una pequeña esfera o bolita.
Observando con atención el gráfico se puede ver que en la entrada E y en todas las salidas Q, hay una pequeña esfera o bolita.
 Una vez hecho el mapa, debemos marcar las regiones contiguas que manejen 1s. Aquí en el dibujo vemos cómo se marcan dos regiones. Estas regiones son las simplificaciones. Como la región azul involucra solamente a la b, eso representa. La región verde, por su parte, involucra solamente a la a. Para cada región, debemos checar qué variables involucra. En el caso de la región azul, cubre a la b, pero con respecto a la variable a maneja tanto a como a', y por eso se descarta la a. Una vez definidas las regiones, se escribe la función simplificada f= b + a.
Una vez hecho el mapa, debemos marcar las regiones contiguas que manejen 1s. Aquí en el dibujo vemos cómo se marcan dos regiones. Estas regiones son las simplificaciones. Como la región azul involucra solamente a la b, eso representa. La región verde, por su parte, involucra solamente a la a. Para cada región, debemos checar qué variables involucra. En el caso de la región azul, cubre a la b, pero con respecto a la variable a maneja tanto a como a', y por eso se descarta la a. Una vez definidas las regiones, se escribe la función simplificada f= b + a.


 Ejemplo 2:
Ejemplo 2:



